这是一个Python计算机视觉图像识别的assignment代写
Hand in: A report about your experiments (see assignment 1 for content and description). Electronic
copies of your ECJ code and data. Use Excel (or similar app) to create performance graphs, to be
included in your report.
System: Any GP system of your choice. You will need to do image file I/O.
Overview: There are 2 possible problems you can select from: (a) Computer vision; or (b) Evo-Art
and procedural textures. Please do only one!
A. Computer Vision
You are going to use GP to perform computer vision. The problem is to identify specific features in
images. For example, consider this photograph of a meteor shower:

The task is to train a GP to identify the image pixels that correspond to meteor trails. To do this, you
need to have a ground truth image, which is a hand-generated image that shows the pixels where
meteors are located (in red).

In this case, you use it as a “solution” for obtaining training data, in order to evolve a genetic program
that identifies meteor locations. You then execute the GP tree over a pixel in the image. If a pixel
resides over a meteor trail, the GP program should generate TRUE (or a value ≥ 0.0). Otherwise it
generates FALSE (value < 0.0). Ideally, it would produce exactly the true/false information residing
in the ground truth image. In a sense, the perfect GP program would be a “meteor filter”.
Another example: identifying planes parked at an airport:
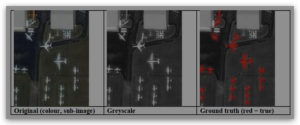
The above image is from Google Maps (satellite), which is a great source of different image data to
use. You could have the GP identify other features from images (cars, buildings, trees, boats in water,
roads, etc.).
To make a ground truth image, you need to carefully hand-paint the pixels that classify what you
want the GP program to identify as “true”. Your GP training should use a selection of positive (red)
and negative pixels. Note that you will almost never get close to 100% correct accuracy, since some
pixels will be tricky to classify. Edges around the red pixels are usually challenging, especially
considering that the painted ground truth image will have errors and noise. For testing data, you can
use the pixels that were not used for training. Alternatively, you might test the GP on another image
(with similar photographic characteristics – colours, scale, etc.).
Your program will be called by “wrapper code”, which will apply your GP program on all the pixels
of an image one-by-one. Hopefully, your program will correctly detect most positive pixels. These are
called true positives. Pixels that are correctly identified as not the object are true negatives.
Sometimes errors may occur. Pixels falsely identified as objects are false positives, while object
pixels that are missed are false negatives. Hence your fitness function will simply tally the overall
percentage of correctly identified pixels. But when computing a fitness value, the fitness should be
normalized with respect to total true positives and true negatives; otherwise, it may benefit a GP to
simply identify everything as “false”, because the majority of area of an image, such as seen in the
ones above, may not have aircraft or meteors! You should also dump out the true/false
positive/negative scores on your testing image at the end of a run (more on this later).
Image data: For training and testing, you need to read in the source and ground truth images. You
can use a B&W image. (Colour are fine too, but will require a bit more work in the GP language; you
might therefore convert the colour image to greyscale). The training process might presume that any
portion of the image that is not painted over represents pixels that are to be classified as false. Note
that using the entire image for fitness evaluation is excessive and very time consuming. A
recommended strategy is to use K pixels residing on red areas as positive examples, and L pixels on
non-red as negative examples, where K and L are user parameters. You can search for them
randomly, or pre-select them by hand (which is more work to do, but you might be able to select a
smaller and more effective training set).


