本次美国代写是Python/Matlab路径规划算法的一个assignment
1 Introduction
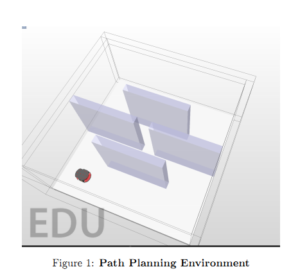
In this assignment we will learn how a path planning algorithm works. You are
given a CoppeliaSim scene (path planning.ttt) (Figure 1). In this scene, there is
a bounding box indicating the environment boundaries. There are some static
obstacles in the environment, as well as, a differential drive robot “Pioneer 3-
DX”.
The robot’s Start and Goal locations are:
Start: 1:49447155; 1:749998569; 0:1387930661
Goal: 2:130528212; 1:775000691; 0:1387930661
Use this scene to search the robot’s path from its start position to the goal
and then back to its original start position. In this process, you need to store
the path in some data structure so that you can move the robot back to its
original position.
Following is a list of functions that can be useful in completion of this task:



