这是英国的一个Matlab Slam算法和路径规划作业代写
Task 1 – Simultaneous Localisation and Mapping (50 marks)
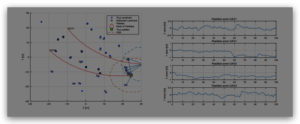
In Task_1_SLAM.zip, the particle filter SLAM algorithm has been designed to navigate two
UAVs flying over the landmarks. In the current settings, both the range and bearing of the
landmarks are measured from the UAVs within the field of range.
1. Particle filter SLAM with bearing-only measurements:
Assuming that only the bearing measurements are available, modify the
measurement model, and derive the Jacobian matrix. Write their equations in the
report [2.5 marks]. Modify the codes accordingly to implement the SLAM algorithm
with bearing-only measurements. A suggestion is to modify fn_landmark_update.m,
Init_filter.m and/or Measurement.m, but you can change other scripts if needed.
Write the modified parts of the code in the report [5 marks]. Compare the
estimation error with the original results, and discuss how to improve the estimation
accuracy using bearing-only measurements [5 marks].
2. Particle filter SLAM with range-only measurements:
Assuming that only the range measurements are available, modify the measurement
model, and derive the Jacobian matrix. Write their equations in the report [2.5
marks]. Modify the codes accordingly to implement the SLAM algorithm with range
only measurements. A suggestion is to modify fn_landmark_update.m, Init_filter.m
and/or Measurement.m, but you can change other scripts if needed. Write the
modified parts of the code in the report [5 marks]. Compare the estimation error
with the original results, and discuss how to improve the estimation accuracy using
range-only measurements [5 marks].
3. Data association:
In Task_1_SLAM.zip, it is assumed that the assignments of the measurements to
landmarks are known, i.e. data association algorithm is not required. Assuming that
this is not known and data association algorithm should be implemented, discuss the
difficulties that may arise, comparing with the case of bearing-only or range-only
measurements [5 marks]. Also, describe possible resolutions to improve the data
association accuracy [5 marks].
4. EKF SLAM:
Another commonly used filter for SLAM is Extended Kalman Filter (EKF). Formulate
the EKF SLAM algorithm using both the range and bearing measurements, by
defining appropriate state and measurement models [2.5 marks], and by describing
the state/covariance predication and update steps [2.5 marks]. Implement the EKF
SLAM algorithm by modifying the given code [5 marks]. Compare the estimation
error with the original results, and discuss the differences between the particle filter
SLAM and the EKF SLAM algorithm [5 marks].


