这是一篇来自加拿大的关于高级控制系统最终测试的程序代写
Your take home exam is made up of two parts.
Part I: This portion of the take home exam is free form and is not timed. This must be submitted online in canvas by midnight on Dec. 16th, 2022.
Part II: This portion of the take home exam will be done directly in canvas as a “canvas quiz”. This will be a timed test intended to take no more than 2 hours, but you will be given 4 hours in which to write it. Make sure to study for this portion of the exam prior to writing it. You will only receive one attempt to write this test. It must be written prior to midnight on Dec. 16th, 2022.
NOTE: When writing this exam, you will be asked to sign a no cheating contract. The terms of this are simple – for both parts of this take-home exam, you are allowed to use your notes, textbooks, Matlab, and you are welcome to search for answers using any references. You MAY NOT ask anyone for help other than your course instructor. Asking for help from anyone other than the course instructor through ANY MEANS WHATSOEVER including any form of verbal, written or other online or in person means constitutes cheating and will result in failing both your exam and the course. To be clear, contacting any person or agency other than the course instructor for any form of help on this exam constitutes cheating and will not be tolerated.
- COMPLEX CONJUGATE POLES
Consider the standard state space description of a system given by:
x = Ax + Bu
y= Cx + Du
This system is not unique because the internal states can be transformed using the straightforward transformation ξ = Tx leading to:
ξ =ANEWξ + BNEWu
y=CnNEWξ + DNEWu
a.Use the transformation equation and matrices to show that sw ANEWT= TA ORIGINAL
b.Using the equation above, solve for the 2-dimensional matrix T that would transform the system with complex conjugate poles:
AORIGINAL=[-a + bi0「–ab10-a- bil’,ANEw=l_一-aJ
c.Use the transformation in part b, to show how the Jordan form system from your midterm can be transformed to a fully real system. Use the system:
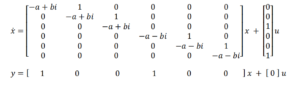
NOTE: The first step is to find a transformation which will give you diagonal blocks. −? 0 + ?? −? 0 − ??4. When doing this, the “1”s from the Jordan form do not disappear,rather they become block identity matrices 1 001 4 as was shown in class.
d.Choose your own values for ?, ? and use Matlab to check your work and show that your solutions are correct. Do this for a few different sets of values for ?, ?.
e.Change around the B and C matrices. Will they always end up real? Try this for a few different structures. Explain what happens.
- CONTROLLABILITY AND OBSERVABILITY IN A JORDAN BLOCK
Create a system in Jordan form whose A matrix is made up of a single 5th order Jordan block.
a.For your initial B and C matrices choose the simplest matrices that ensure that the Jordan Block is both controllable and observable. Use “1” for the value in that does this in the B and C matrices respectively and have all other values set to “0”.
i.Using Matlab confirm that your system is controllable and observable.
ii.Using Matlab confirm that your system is a minimum realization.
b.Move around the “1” into different positions for both the B and C matrices and check controllability and observability as well as checking what the minimum realization of the system is. Keep four “0”s and one “1” in each of the B and C matrices when doing this.
c.Play around with the B and C matrices by keeping the entries that would lead to a fully controllable and observable system as “0” but adding other “1”s to show how entries in different row/columns can change the dimension of the minimum realization of the system.
d.Repeat part c with “1”s in the position that leads to a fully controllable and observable system. Can you add “1”s into other positions of the matrix in order to reduce the dimension of the minimum realization?
e.Discuss what you have learned from this exercise about a system with a Jordan Block. Use concrete examples from the trials above to help explain this.
- MODELLING UNCERTAINTY
Create an 8th order system in Block Diagonal, using real entries only. Make sure that your system is fully controllable and observable but has both stable and unstable poles. The system should have one complex conjugate set of poles in the ORHP and one set of complex conjugate poles in the OLHP.
Create a non-trivial invertible transformation matrix of your choice that can be used to transform your system into a new set of coordinates. (By non-trivial I mean that the resulting system will not be in Jordan Canonical form when you are done.).
PART I
System 1: This is the system which results from applying your transformation matrix to the block diagonal system you started with.
Design two different LQR controllers for your system:
- CONTROLLER 1 is geared towards making the inputs
- CONTROLLER 2 is geared towards keeping the internal states small.
Identify the Q & R matrices you have used for the two controllers above.
- CONTROLLER 3: Design a feedback controller of your choice using pole placement.
Choose two noticeably different sets of initial conditions and simulate the system using each of these initial conditions using all three controllers above. Compare your results and discuss what you have found.
NOTE 1: If your system is unstable, you have made a mistake.
NOTE 2: You should be using your code from Tutorial Quiz #4 as a good starting place for setting this problem up.
PART II
System 2: Using the initial block diagonal matrix, change the value of one of the real poles in the OLHP by about 15% and apply your transformation to this new matrix. This is system 2.
System 3: Using the initial block diagonal matrix, change the value of one of the real poles in the ORHP by about 15% and apply your transformation to this new matrix. This is system 3.
System 4: Using the initial block diagonal matrix, change the value of the complex part of the complex conjugate poles in the OLHP by about 15% and apply your transformation to this new matrix. This is system 4.
System 5: Using the initial block diagonal matrix, change the value of the complex part of the complex conjugate poles in the ORHP by about 15% and apply your transformation to this new matrix. This is system 5.


